1.前言
目前全球定位系统(CPS)定位技术是20世纪90年代兴起的集空间科技、计算机技术、电子技术、无线传输技术等科技于一体而成的高端技术。其基本原理是:卫星(与地球轨道同步)不间断地发送自身的星历参数和时间信息,用户接到这些信息后,经过电脑计算求出接收机的三维位置、三维方向及时间信息,具有速度快、连续、同步、全自动获得三维坐标的优点,已在我国跨海长大桥的定位工作中起到了常规测量仪器无法起到的作用。其平面精度已能达到10mm+2ppm,高程精度达到20mm+2ppm的成果。无疑在工程测量史上是一次大的飞跃和进步。
但是在我国内河的大桥建设中,如果水面宽度或跨河长度在2000m以下时,若采用相应的高精度常规、测量仪器在工作方法上进行改革与创新,充分利用现有资源,同样可以达到上述精度的要求,是完全可能的。
众所周知,《公路桥涵梁施工技术规范》(JTJ 041—2000)表10.10.8—1中的第5项规定:墩台轴线偏位允许偏差为10mm,如果用GPS标定出墩中心的坐标后,按规范要求墩间跨度尚须作检核防止粗差的发生;另一方面,施工中在求得墩中心的位置后,还必须放样出桥墩、台的十字轴线以便施工,这样需用经纬仪来放样。笔者通过国内外若干特大桥的实践,采用独立的坐标系统,测设了与规范规定等级相适应的控制网,所有控制点设置了强制归心的照准觇标和稳定可靠的置仪点。根据墩位的设计坐标和控制点的坐标,事先在内业计算出彼此之间的边长及独立坐标系统的方位角,绘制出几种适应不同仪器的定位网络图,严格复核无误后,方可在现场根据实测边长或方位角,在图上标定观测点的坐标位置,并取得了令人非常满意的成果。这些方法劳动强度低,操作容易,现场作业不必计算,标定点位按1:1的比例进行,因而精度很高且不易出错,一般测量人员都容易掌握,所以已获得使用者的钟爱和接受。现介绍如下:
2.大桥平面控制网的测设要求
桥梁平面控制网的测设是为桥梁建筑施工服务的,要确保桥梁上、下部结构按照设计图纸正确、高精度地进行测量和放样到实地的控制依据。同时为了满足“建管并重”的要求,还必须考虑作为检测墩、台施工过程及竣工后的变形观测的控制依据。这是一项保证工程质量的最根本的基础工作,必须高精度地做好控制网的测设工作,确保控制点点位结构的永久稳定性。这种专用控制网的特点有:①控制的范围小,而控制点问的密度较大,精度要求高;②使用次数频繁,必须定期检核其稳定性;③受施工干扰。
这种桥梁专用控制网必要精度的确定方法,有三种:
(1)一是由跨河长度确定桥轴线的必要精度,就是根据跨河长度的大小来确定桥轴线上两控制点之间的相对中误差,基本上是个等比级数关系:
①桥长100m,两岸控制点之间相对中误差为l:10000;
②桥长200m,两岸控制点之间相对中误差为1:20000;
③桥长500m,两岸控制点之间相对中误差为l:50000。
这是老规范提出的桥轴线精度要求,它既没有考虑到上部结构的形式以及墩跨的大小,也没有顾及定位的精度。
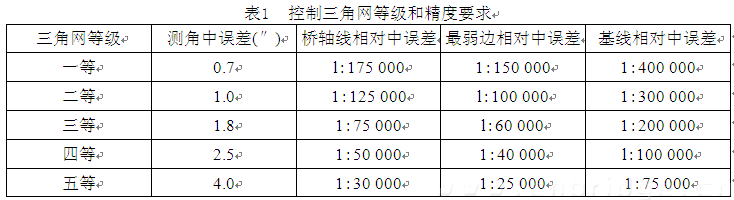
(2)二是由桥长、桥跨的大小、桥式以及施工安装中等因素的综合影响来确定三角网的必要精度,这是目前《新建铁路工程测量规范》(TB 10101—99)对桥轴线精度进行估算的方法,文献[1]在得出全桥长度相对中误差后,就作为布设三角控制网时对桥轴线精度的预定要求。为此,便可根据从《新建铁路工程测量规范》(TB 10101—99)的控制三角网的等级和精度的规定来选择施测的三角网等级,见表1。
(3)三是由墩中心的定位误差来推算控制网最弱边的精度。
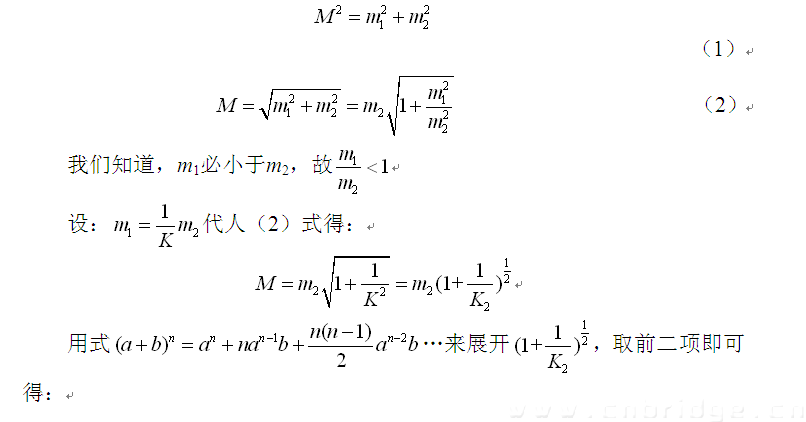
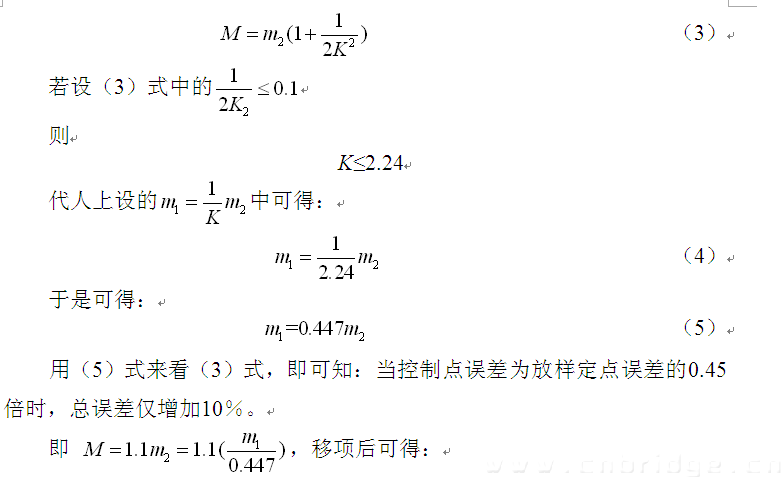
笔者认为布设桥梁专用平面控制网的最重要的目的之一是要高精度地定出墩、台中心的最或是值位置,尽可能地减少偏心的影响,使传力处于最佳状态。这样在布网时,应使控制点本身的误差所引起放样点位的误差,相对于施工放样的误差来说,小到可以忽略不计。根据这个原则,对平面控制的精度要求分析如下:
设 M为放样后所得墩中心点位的总误差;
m
1为控制网的点位误差
m
2为放样时,交会定点的误差。
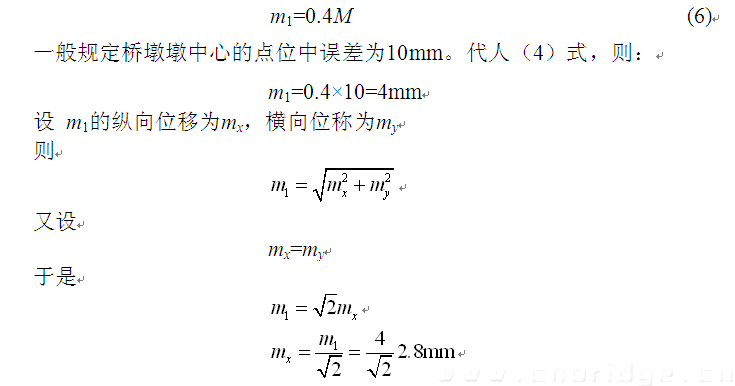
按此数值计算,对于1 000m长的三角网最弱边的相对中误差应不大于
,这个精度要求是相当高的。在实际工作中,我们常常发现全桥长度的最后竣工结果是能满足规范的精度要求的,而江心的墩中心点误差就不易达到l0mm的允许误差范围内,这是因为采用扩大边(最弱边)来放样的结果。为此建议采取下述措施来提高墩中心定位的精度:
(1)增加基线数,作为墩位放样用的控制点最好是基线端点或基线上的节点。
(2)采用边角网,选择有利观测时间,提高观测精度。
(3)采用可调节的钢管活动觇标标心,进行强制归心。
(4)控制点的点位基础,必须稳固。
(5)在基线方向上尽量多设节点,便于选择较好的定位图形。
根据以上分析,采用第三种方法来确定控制网的必要精度是既能在宏观上控制好桥轴线的精度,又能在微观上控制好每个水中墩位的精度达到规范的要求,基础工作做得扎实可靠,才能确保全桥的定位精度要求,是不容忽视的。
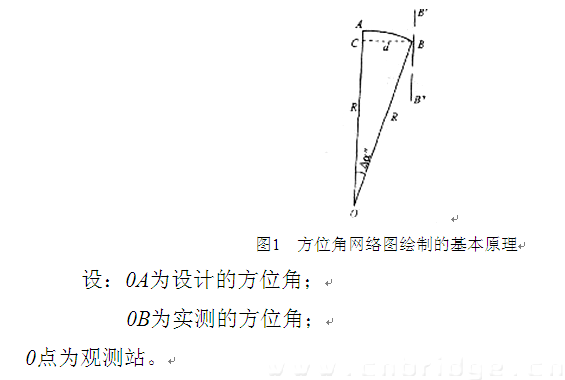
3. 方位角网络图绘制的基本原理及应用实例
施工测量单位若不具备光电测距仪或全站仪设备,只要有高精度的控制网,采用秒级经纬仪进行前方交会的网络图来定位也是非常方便的。这种方位角定位网络图是根据所需定位的墩中心设计坐标与选定的控制点的坐标反算出其间的边长、方位角及根据边长求得的弧度秒差值来绘制的。每个墩位至少要有三个控制点的测站来进行交会,以相互检核,应在图纸上得出示误三角形,取其内切圆心即是所求点的坐标位置。如图1所示。

举例:由于平面控制网上选择好的各控制点至各墩间的独立坐标系方位角、交会边长、各边的弧度秒差弧距值(S/p”)都是预先在放样的总平面图上设计并计算好了的。
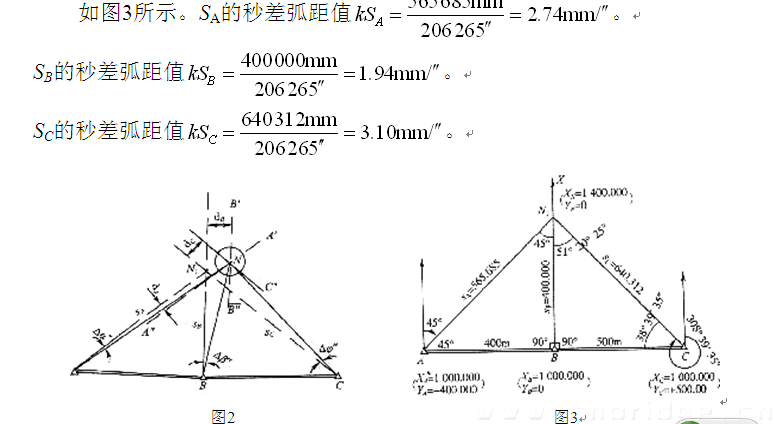
根据这三个方向的秒差绘制成用一定范围的角差为间距的方位角列线线族网络图。这种底图同观测的方法相适应,由三个方向的线族(Group Lines)组成,线族成平行线的线间距d
i=4″×S
i/206 265=4k
i,也就是每两条线的间距代表4″的角差。如图4所示。
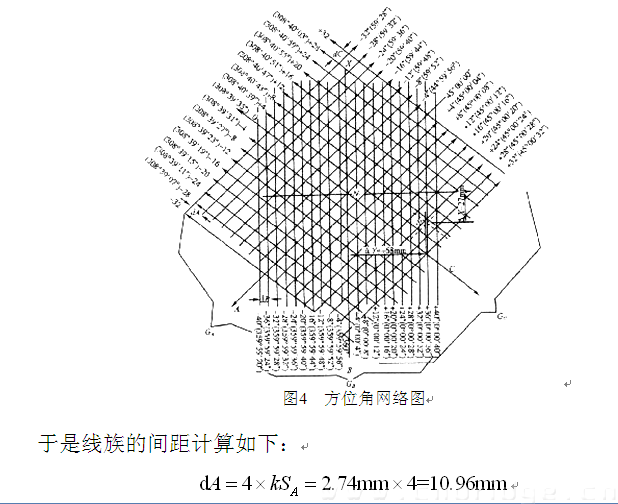

由三个方向的线族组成的方位角网络图,现场操作时置仅点用方位角来后视任意适宜的控制点觇标二个以资检核,然后三个测站的经纬仪在统一信号下(一般由墩上的测量人员发布)同时瞬间观测水中基础机构中心N上所竖立的标杆,将读得方位角,随即用电话报告墩上测量人员。他就可以根据三个方位角值,直接标定N点的位置,与设计中心比较既可得出与值,如图4所示:
采用同时瞬间观测的目的,主要是水中的基础结构尚未下沉到稳定的高程,有晃动的状态。瞬间观测,标定点位产生的示误三角形小,标定精度高,提供数字及时,一般在2min内即可测定,随测随报,可以从系统的记录中找出结构物在水中变动的幅度,从而了解锚锭锚绳伸缩幅度状况,借以调整锚绳长度,使其受力均匀,有利于安全,保证水中基础结构定位的精度。
从实践经验中可知,这种前方交会网络图定位法,不仅适用于大桥水中墩的定位工作,从小到一根单桩大到巨型沉井均可精密定位,而且对于港口码头,近海钻机平台的就位,水中漂浮建筑物的位移幅度的测定,都可以因地制宜地选择各种比例图来使用。因而只要有设计的坐标或虚拟的点位坐标,就可事先计算并绘制所需精度的网络图,外业实际应用时,甚感方便。
4. 边长交会网络图绘制的基本原理及应用实例
用光电测距仪测距定位最大的优点是工作简单,速度快,精度能满足要求,但必须特别指出的是在工作前,仪器应作过近期检验或在已知边上作校对比测,得出其加常数误差,进行校正。否则稍有疏忽,就会出现粗差。
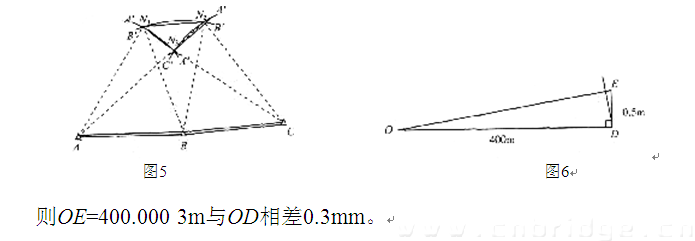
边长交会时,一般采用三条边交会,以置仪点为圆心以观测边为半径,作三段弧长交会于N
1、N
2、N
3三点,如图5所示。
由于S
AN、S
BN、S
CN的观测边长比示误三角形△Ⅳ,Ⅳ2Jr,的边长大的多,所以将圆弧N
1N
2、N
2N
3、 N
1N
3用直线来代替,因此产生的误差是极小的。完全可以忽略不计。如果交会边长为400m,观测点与设计的点相距0.5m,如图6所示。
所以我们在稳定的墩、台基础上,置仪于N点,应分别在A、B、C上安置反射镜,测定三条边S
AN、S
BN、S
CN,用1:1或1:2的比例根据设计边长作切线方向的边长交会网络图就非常容易了,如图7所示。
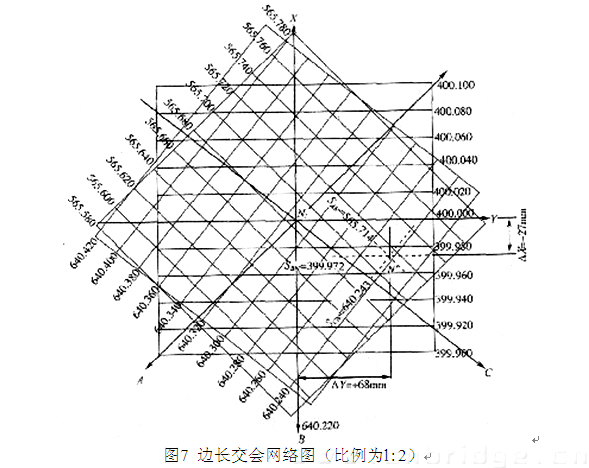
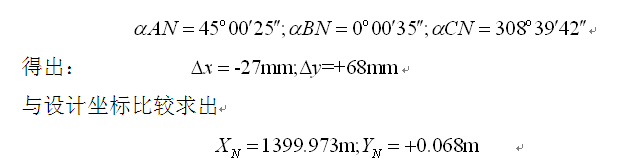
假定测得S
AN
′=565.714,Sb
N
′=399.972,S
CN
′=640.243。
在图上可很容易标定出N点,其坐标差:△X=-27mm,△Y=+68mm。
5. 用全站仪进行网络图定位的方法
全站仪实际上是将光电测距仪和电子经纬仪结合为一体的仪器,它的全称为全站型电子速测仪,这种仪器除能自动测距、测角外,由于配有数
据处理系统,故还能快速完成一个测站所需完成的工作,包括平距、高差、坐标以及放样等方面的计算。因而它具有多功能、高精度、自动化等方面的优点,是其他常规仪器不能做到的。但是全站仪是一种结构复杂、功能齐全、价格昂贵的先进测量仪器,在使用中要精心操作,如果仪器发生故障就会给工作带来直接的影响。与全站仪配套使用的反射棱镜,也必须保持干净,要严格安置在测点上。全站仪的测角误差,横轴误差和竖轴误差,还有水平度盘偏心差,竖直度盘偏心差,竖直指标差以及光学对中器的误差等,在使用前必须经过近期的严格检验。全站仪与一般光学经纬仪最主要的不同之处,是它可将测出的视准差存储起来,在测角中自动对观测值进行修正,而竖轴误差也能通过倾斜补偿自动消除。这是一般光学经纬仪所不能做到的,所以越是先进、精密的仪器,越是要正确地使用。在水中墩的精密定位工作中,若仅在一个测站上测定点位的坐标,是缺乏检样核条件的。至少应在第二个控制点测站上进行检测,以避免粗差发生。同样可以采用上述方位角网络和边长交会网络来合并使用图上定点,取两套方法得出的坐标平均值,作为测定值,本文就不再赘述了。
6. 结语
大桥墩、台定位最关键的问题,是在施工、测量过程中不允许出现粗差,为确保定位精度,必须做好基础工作,要布设高精度的专用控制网,其控制点位要确保其稳定性和耐久性。为了避免现场定位出粗差,多做些内业准备工作,未雨绸缪,才能防患于未然。所绘制的网络图一定要仔细复核无误后,方可拿到现场使用。这种网络图的定位方法还可以举一反三,用在后方的交会工作上,参考文献[1]已有介绍就不再重复。
参考文献
[1]朱海涛.桥梁工程实用测量[M].第2版.北京:中国铁道出版社,2004.
《第十九届全国桥梁学术会议论文集》上册2010年
(作者 朱海涛)





 ,这个精度要求是相当高的。在实际工作中,我们常常发现全桥长度的最后竣工结果是能满足规范的精度要求的,而江心的墩中心点误差就不易达到l0mm的允许误差范围内,这是因为采用扩大边(最弱边)来放样的结果。为此建议采取下述措施来提高墩中心定位的精度:
,这个精度要求是相当高的。在实际工作中,我们常常发现全桥长度的最后竣工结果是能满足规范的精度要求的,而江心的墩中心点误差就不易达到l0mm的允许误差范围内,这是因为采用扩大边(最弱边)来放样的结果。为此建议采取下述措施来提高墩中心定位的精度:








